快捷导航
上海总部:上海市 普陀区 怒江北路598号 红星世贸大厦B栋1206室
邮编:200333
总机:021-61243616
传真:021-61243616*819
业务邮箱:
sales@hmelectronics.com.cn
邮编:200333
总机:021-61243616
传真:021-61243616*819
业务邮箱:
sales@hmelectronics.com.cn
资讯文章
正弦磁链脉宽调制(PWM)之电压空间矢量和磁链矢量λ
正弦磁链脉宽调制(PWM)之电压空间矢量和磁链矢量λ
三相异步电动机,如果具有一个圆形旋转气隙磁场的话,它的性能一定是很优异的,交直交逆变器输出三相完美的正弦电压或者电流的波形是很困难的。
磁链正弦PWM方法,就是按一定规律控制逆变器开关元件,使产生的气隙磁链运行轨迹接近圆形。
1电压空间矢量
图7-15为一电压型逆变器驱动三相异步电动机,定义电压空间矢量为V
V=Ua+α2Ub+αUc(7-7)
j=√-1为单位虚数。
输出ua、ub、uc各有两种电位+Ud/2或-Ud/2,所以空间矢量V依据开关元件的开关状态,共有23 = 8种状态。
一个支臂上部元件导通,这相电位为+Ud/2时定为1,一个支臂下部元件导通,这相电位为-Ud/2时定为0。
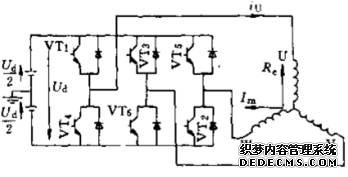
图7-15 PWM逆变器驱动异步电动机
八种电压矢量分别为

括弧中的二进制数,表示三相、b、c的状态
1表示支臂上开关元件导通,0表示支臂下开关元件导通。Vk中下标k = 0〜7是十进制数表示括弧中二进制数值。如图7-16a所示,这八种电压矢量。除了 V0、V7幅值为0外,其他电压矢量幅值均为Ud。
2磁链矢量λ
磁链矢量用电压矢量对时间的积分表示
λ=λ0+Vkt (7-9)
式中λ0—起始值。
图7-16b画出,Vk = V6情况下;I与Vk关系。A是沿…的方向以|Vk|=Ud的速度运动。如果加的是V0, V7 磁链λ=λ0不动。V1〜V6称非零矢量也叫形成轨迹矢量,V。、V7称零矢量也叫停顿矢量。
磁链正弦PWM的思路就是不断的有规律的变换Vk和作用时间,使磁链λ运行轨迹尽量接近半径为R0的理想圆形。
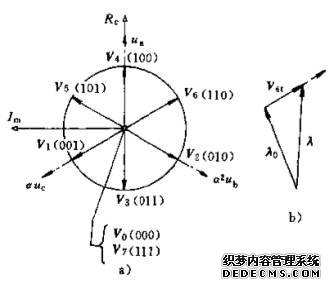
图 7-16电压矢量和磁链矢量
a)电压矢量b)λ与V关系
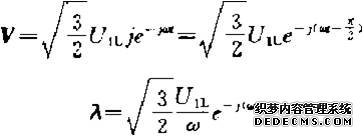
理想时圆形磁场.意味着供给异步电动机的电压是三相对称的正弦波。公式(7-10)
式中UIL——电动机定子线电压有效值。
代入电压矢量方程得
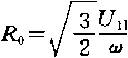
理想圆半径
(文/上海合美电子科技有限公司)
上海合美电子科技有限公司
电话:021-61243616 传真:021-61243616*819 地址:上海市 普陀区 怒江北路598号 红星世贸大厦B栋1206室
沪ICP备16054338号-2

沪公网安备 31010702002036号